Class 11 Physics Newton’s Laws of Motion and Friction – Get here the Notes, Question & Practice Paper of Class 11 Physics for topic Newton’s Laws of Motion and Friction Notes. Newton’s Laws of Motion and Friction Notes for Class 11 Physics are here. You can download the Newton’s Laws of Motion and Friction Notes PDF to study all the topics in this chapter. Moreover the class 11 Physics notes include chapter summary, definitions, examples, and key pointers for Newton’s Laws of Motion and Friction. Thus if you are studying class Physics (भौतिक विज्ञान), then the Newton’s Laws of Motion and Friction notes will help you easily understand the topic and ace it.
Class 11 Physics Notes for Newton’s Laws of Motion and Friction
Newton’s Laws of Motion and Friction is a critical part in the study of Physics. In India, it is taught in class. Therefore the class 11 Notes for Physics topic Newton’s Laws of Motion and Friction have been compiled by teachers and field experts. They explain the complete chapter of Newton’s Laws of Motion and Friction in one-shot. Whether you are studying the topic Newton’s Laws of Motion and Friction to complete your class syllabus, or for any competitive exam like JEE, NEET, UPSC, you can simply refer these notes to complete the chapter in one-shot!
Newton’s Laws of Motion and Friction Notes Download Link – Click Here to Download PDF
Newton’s Laws of Motion and Friction Notes for Class 11 Physics PDF
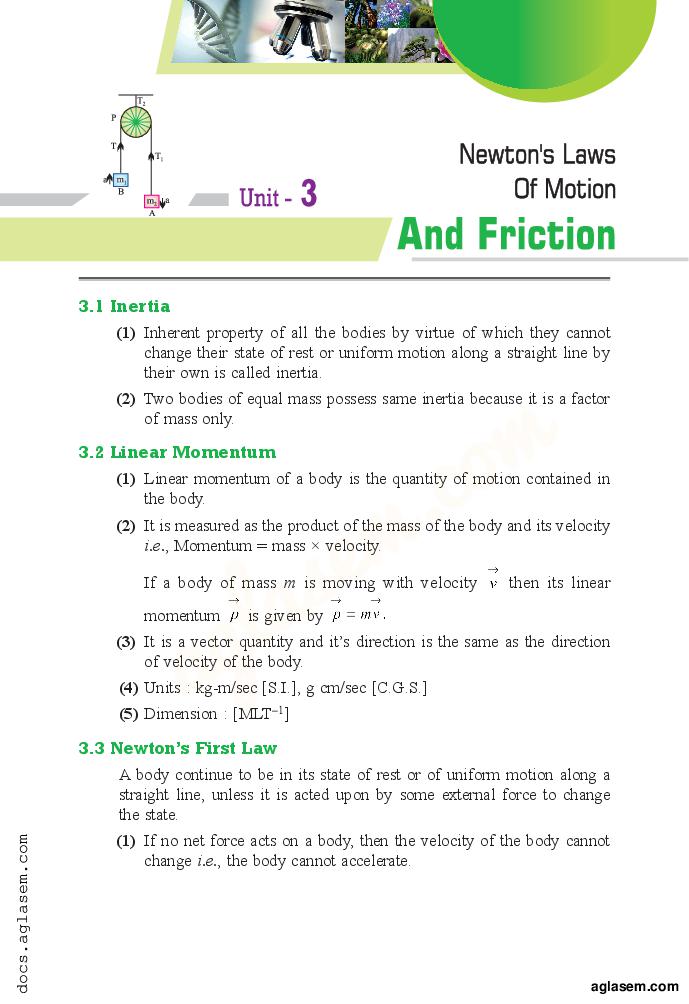
The PDF of Newton’s Laws of Motion and Friction class 11 notes is as follows. You can view the document here and also download it to use it anytime for future reference whenever you want to brush up your concepts of Physics.
Class 11 Physics Notes Newton's Laws of Motion and Friction View Download




Candidates who are ambitious to qualify the Class 11 with good score can check this article for Notes, Study Material, Practice Paper. Above we provided the link to access the Notes, Important Question and Practice Paper of Class 11 Physics for topic Newton’s Laws of Motion and Friction.
All Topics Class 11 Physics Notes
Chapter wise notes for Physics (भौतिक विज्ञान) are given below.
- Dimensions and Measurement
- Gravitation
- Kinematics
- Kinetic Theory of Gases
- Matter
- Motion
- Newton’s Laws of Motion and Friction
- Oscillations and Waves
- Thermodynamics
- Work, Energy and Power
Class 11 Notes for All Subjects
- Class 11 Accountancy Notes
- Class 11 Biology Notes
- Class 11 Business Studies Notes
- Class 11 Chemistry Notes
- Class 11 Economics Notes
- Class 11 English Notes
- Class 11 Geography Notes
- Class 11 Hindi Notes
- Class 11 History Notes
- Class 11 Maths Notes
- Class 11 Physical Education Notes
- Class 11 Physics Notes
- Class 11 Political Science Notes
- Class 11 Sociology Notes
NCERT Solutions for Class 11 Physics Newton’s Laws of Motion and Friction
The Newton’s Laws of Motion and Friction notes here help you solve the questions and answers. Also, you can complete the class 11 Newton’s Laws of Motion and Friction worksheet using the same. In addition you will also tackle CBSE Class 11 Physics Important Questions with these class 11 notes.
However if you still need help, then you can use the NCERT Solutions for Class 11 Physics Newton’s Laws of Motion and Friction to get all the answers. Newton’s Laws of Motion and Friction solutions contain questions, answers, and steps to solve all questions.
Notes for All Classes
Newton’s Laws of Motion and Friction Notes for Class 11 Physics – An Overview
| Name of Topic | Newton’s Laws of Motion and Friction |
| Class | 11 |
| Subject | Physics |
| All Class 11 Physics Notes | Class 11 Physics Notes |
| All Class 11 Notes | Class 11 Notes |
Class 11 Newton’s Laws of Motion and Friction Notes for All Boards
You can use the class 11 Physics notes of Newton’s Laws of Motion and Friction for all boards.
The education boards in India for which Newton’s Laws of Motion and Friction notes are relevant are – CBSE, CISCE, AHSEC, CHSE Odisha, CGBSE, HBSE, HPBOSE, PUE Karnataka, MSBSHSE, PSEB, RBSE, TBSE, UPMSP, UBSE, BIEAP, BSEB, GBSHSE, GSEB, JAC, JKBOSE, KBPE, MBOSE, MBSE, MPBSE, NBSE, DGE TN, TSBIE, COHSEM, WBCHSE.
Therefore you can refer to these notes as CBSE, CISCE, AHSEC, CHSE Odisha, CGBSE, HBSE, HPBOSE, PUE Karnataka, MSBSHSE, PSEB, RBSE, TBSE, UPMSP, UBSE, BIEAP, BSEB, GBSHSE, GSEB, JAC, JKBOSE, KBPE, MBOSE, MBSE, MPBSE, NBSE, DGE TN, TSBIE, COHSEM, WBCHSE notes for class Class 11 / Class / Physics for the topic Newton’s Laws of Motion and Friction.
To get study material, exam alerts and news, join our Whatsapp Channel.